





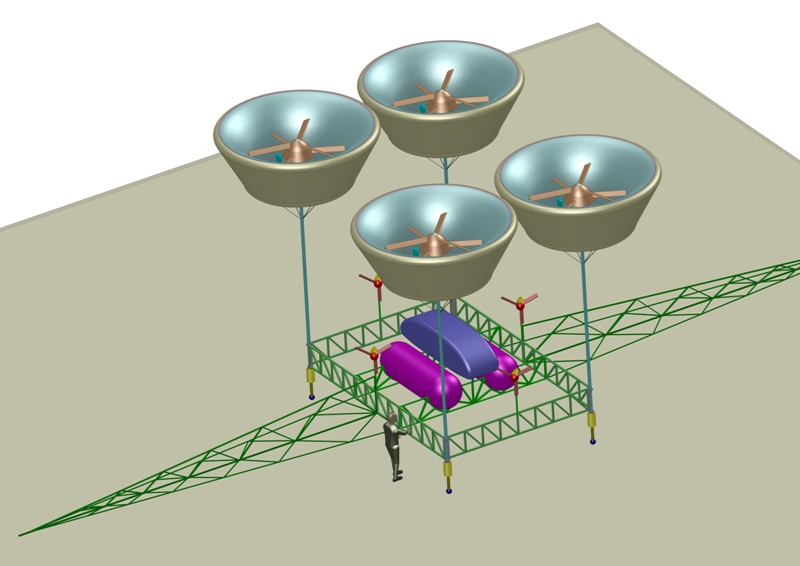
Платформа предназначена для перемещения людей и грузов. Состоит из автономных подъёмных модулей с автономной силовой установкой и соосными винтами. Винты с силовой установкой заключены в обечайку и закреплены на мачту. Относительно мачты обечайка может отклоняться в любую сторону на угол до 30° и таким образом менять вектор тяги. Минимальное количество модулей - 4, максимальное не ограничено и зависит от задачи, для которой собирается платформа. Модульность конструкции и многовекторный способ управления придаёт платформе уникальные свойства безопасности и манёвренности.

Пока платформа стоит на земле, на ней размещают полезный груз. Груз либо складывают на платформу, либо подвешивают к платформе если она выполнена в виде фермы . Запускают силовую установку и соосные винты в роторных ячейках начинают вращаться. Струя воздуха в обечайках отбрасывается сверху вниз создавая часть подъёмной силы, другая часть подъёмной силы создаётся за счёт жёсткого диффузора обечайки в силу того, что перед винтами создаётся зона пониженного давления, таким образом, подъёмная сила каждой роторной ячейки с обечайкой больше чем если бы это были открытые винты при той же подводимой мощности. С увеличением оборотов винтов платформа отделяется от земли и поднимается на заданную высоту. За счёт того, что роторные ячейки установлены на достаточно высоких мачтах воздействие отбрасываемых струй воздуха от воздушных винтов на землю и на саму платформу уменьшается, что увеличивает безопасность и удобство эксплуатации. Ступица винтов с мачтой соединена управляемыми тягами, которые могут изменять наклон ячейки относительно мачты на угол до 30 градусов. Для возможности быстро наклонять ячейки без возникновения дестабилизирующих гироскопических моментов в конструкции используются соосные воздушные винты. Совместным либо автономным наклоном ячеек относительно своих мачт может достигаться любой манёвр в горизонтальной плоскости, например вперёд, назад, вправо, влево, поворот относительно вертикальной оси по команде с пульта управления, причем пульт управления может находиться удаленно. При этом само положение платформы может оставаться горизонтальным. Для изменения высоты полёта увеличивают или уменьшают обороты воздушных винтов всех ячеек. Для наклона платформы можно так же управлять как наклоном ячеек так и оборотами винтов. При этом можно обеспечить любые манёвры в горизонтальной плоскости с наклонённой на заданный угол платформой. Безопасность летающей платформы при столкновениях с препятствиями обеспечивают эластичными оболочками обечаек.
Соосная система винтов находится в обечайках создающих подъёмную силу. Ячейка вынесена на мачту и может откланяться автономно в разные стороны. Модульность формирования платформы в зависимости от задач.




