







Технология силовой активной гироскопической стабилизации одноколейных транспортных средств (ОКТС) основана на свойстве прецессии гироскопа. При помощи гиростабилизатора, содержащего по меньшей мере один силовой гироскоп, на ОКТС накладываются крутящие моменты заданной величины и направления, поддерживающие его равновесие и управляющие его креном.

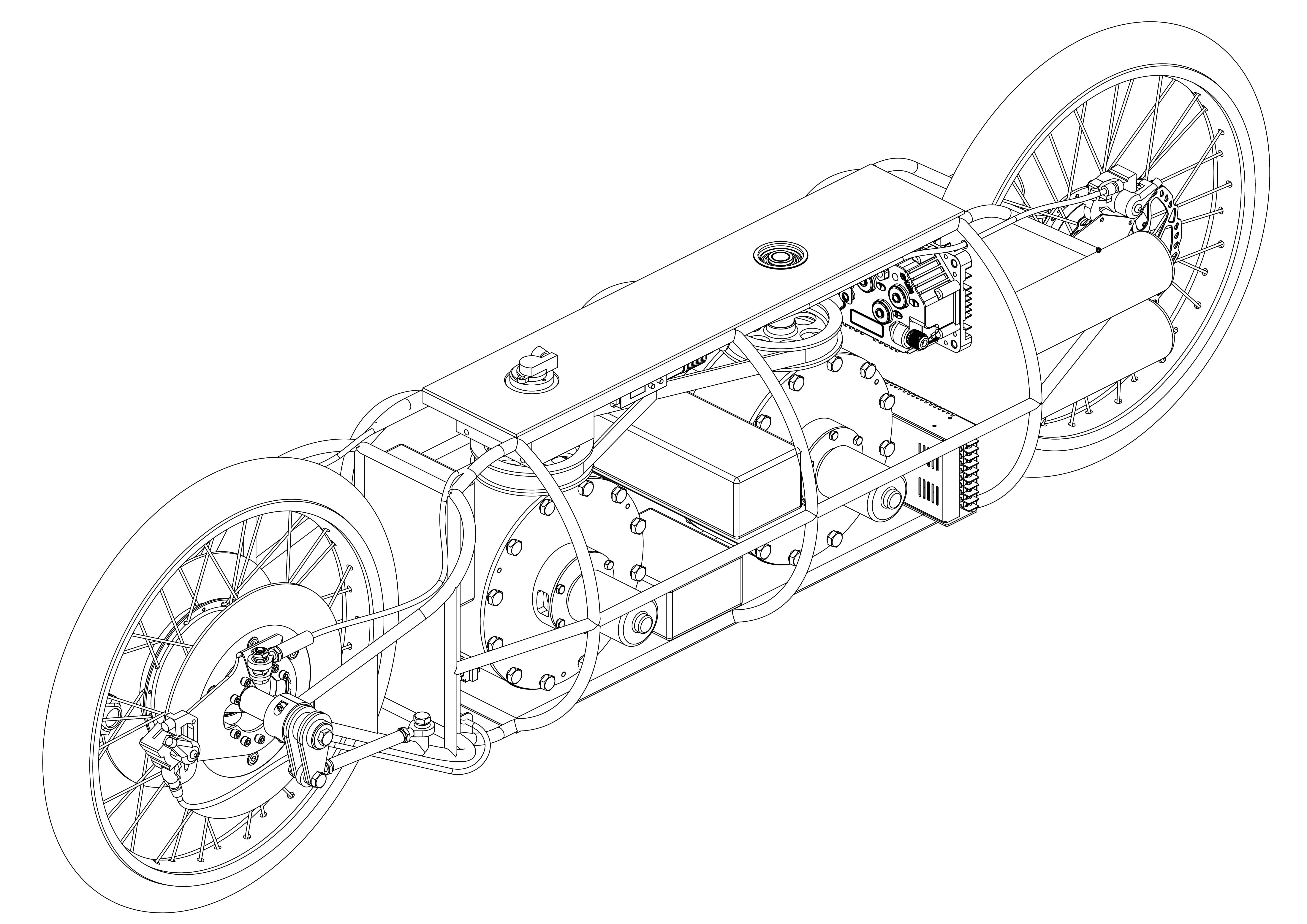
Заявленное гиростабилизированное беспилотное ОКТС состоит из рамы, рулевого и тягового ходовых колёс, гиростабилизатора, систем дистанционного управления и питания.Гиростабилизатор состоит из двух гиромоторов установленных в подшипниковых опорах рамы. В каждом гиромоторе вращается маховик. Поворот гиромоторов выполняется при помощи сервопривода. Сервоприводом управляет блок управления, который состоит из датчика угла крена шасси, датчика угла поворота гиромотора, а также контроллера.Известно, что момент прецессии М одного гиромотора в поперечной плоскости ОКТС равен: M=IωΩcos(β); где I – момент инерции маховика; ω – угловая скорость вращения маховика; Ω – угловая скорость поворота гиромотора вокруг оси прецессии; β – угол отклонения плоскости момента прецессии гиромотора от поперечной плоскости ОКТС. Угол β ограничен, и составляет 70° в каждую сторону, т.е. гиромотор должен всегда возвращаться в исходное положение.Работа системы. ОКТС стоит вертикально, гиростабилизатор включён. При приложении опрокидывающего момента к ОКТС, датчик крена отслеживает изменение угла крена, и отправляет его в контроллер. Также в контроллер передаётся текущее положение гиромоторов. Контроллер обрабатывает данные, и отправляет выходной сигнал на сервопривод. Сервопривод поворачивает гиромоторы. Гиромоторы в результате поворота создают восстанавливающий момент, который передаётся на корпус ОКТС и восстанавливает его исходное положение.При прохождении поворотов, гиростабилизатор, отслеживает нарушение равновесия ОКТС и наклоняет его так, чтобы равнодействующая сил инерции и тяжести проходила через линию контакта ходовых колёс с землёй. ОКТС может испытывать в повороте удары и смещение центра масс, от перемещения грузов. На что стабилизатор реагирует изменением угла крена ОКТС. Возврат ОКТС в вертикальное состояние должен быть синхронизирован с возвратом гиромотора, иначе момент прецессии возникающий при возврате гиромотора нарушит баланс.
Заяв. на патент форма ОКТС макс-но реализует возможности стабилизатора. Алгоритм управления: синхронизирует наклон ОКТС и гиромотора; позволяет не выполнять точную настройку датчика крена; позволяет стабилизатору функционировать автономно в составе ОКТС.




